




Manipulator na may Clamp
Panimula
a) Ang parehong puwersa na hard arm assist manipulator ay kayang magbalanse ng iba't ibang timbang mula 2 hanggang 500kg.
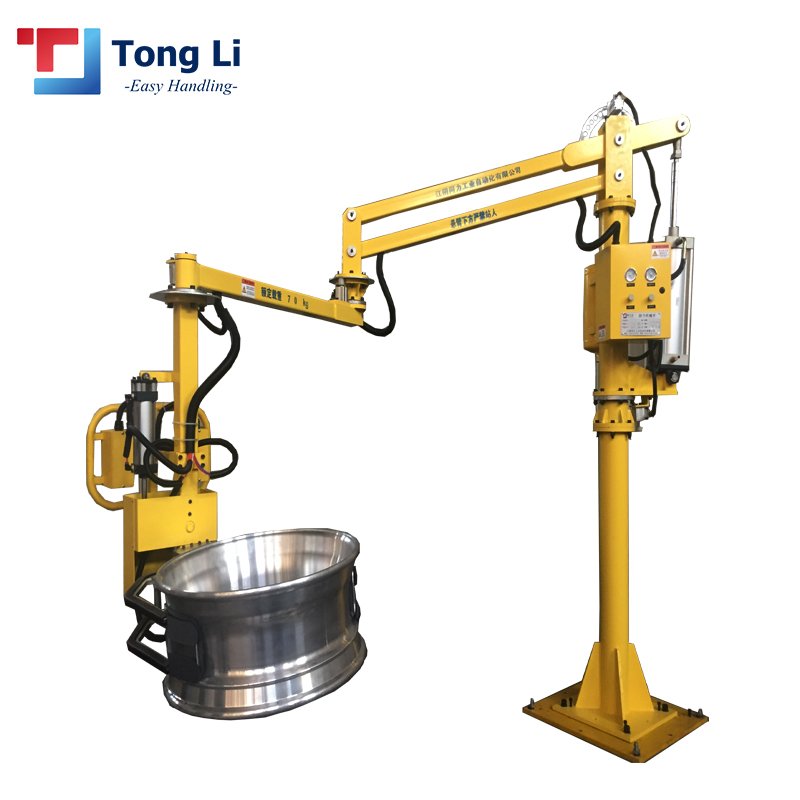
b) Ang power-assisted manipulator ay binubuo ng isang balance host, isang graspwing fixture, at isang istrukturang pang-install.
c) Ang manipulator host ang pangunahing aparato na nakakaalam ng lumulutang na estado ng mga materyales (o workpiece) sa hangin nang walang grabidad.
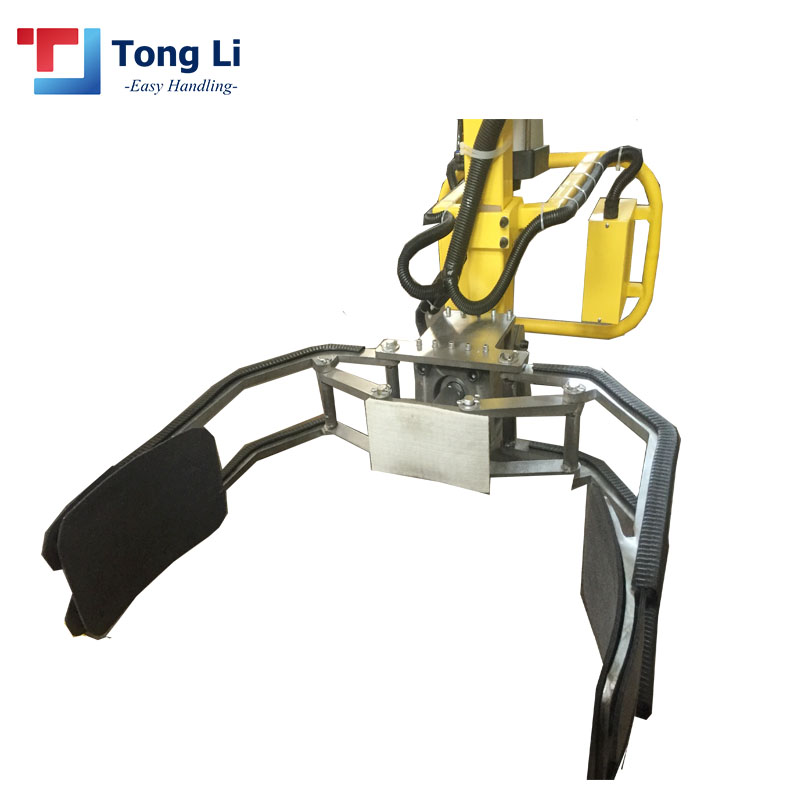
d) Ang manipulator ay ang aparato na nakakahawak sa workpiece at nakakakumpleto sa mga kaukulang kinakailangan sa paghawak at pag-assemble ng gumagamit.
e) Ang istruktura ng instalasyon ay isang mekanismo na sumusuporta sa buong hanay ng kagamitan ayon sa lugar ng serbisyo at mga kondisyon ng site ng gumagamit.

| Modelo ng kagamitan | TLJXS-YB-50 | TLJXS-YB-100 | TLJXS-YB-200 | TLJXS-YB-300 |
| Kapasidad | 50kg | 100kg | 200kg | 300kg |
| Radius ng pagtatrabaho | 2500mm | 2500mm | 2500mm | 2500mm |
| Taas ng pag-aangat | 1500mm | 1500mm | 1500mm | 1500mm |
| Presyon ng hangin | 0.5-0.8Mpa | 0.5-0.8Mpa | 0.5-0.8Mpa | 0.5-0.8Mpa |
| Anggulo ng Pag-ikot A | 360° | 360° | 360° | 360° |
| Anggulo ng Pag-ikot B | 300° | 300° | 300° | 300° |
| Anggulo ng Pag-ikot C | 360° | 360° | 360° | 360° |






a) Maaari nitong mapagtanto ang estado ng balanseng grabidad ng iba't ibang materyales na may bigat, na angkop para sa tumpak na operasyon ng paglilipat ng mga materyales.
b) Kapag walang karga, buong karga at iba't ibang workpiece ang pinoproseso, mararamdaman ng sistema ang pagbabago ng bigat at mapagtanto ang lumulutang na estado ng karga sa three-dimensional space, na maginhawa para sa tumpak na pagpoposisyon.
c) Ang mga katangian ng ganap na balanse, maayos na paggalaw, atbp., ay nagbibigay-daan sa operator na madaling isagawa ang paghawak, pagpoposisyon, at pag-assemble ng workpiece.
d) Ang matibay na braso ay maaaring magpaandar sa manipulator upang madala ang workpiece sa mga balakid; ang pahalang na braso ay maaaring matugunan ang mga kinakailangan ng pahalang na paglalagay at pahalang na pag-alis ng mga materyales sa mga kaugnay na lugar.
e) Kayang panatilihin ng sistema ang antas ng ulo ng manipulator at magpakita ng mataas na kakayahang magamit.
f) Pinagsamang aparato ng preno, na may maraming rotary joint upang maisakatuparan ang pagpili at paglalagay ng materyal sa isang malawak na lugar; gamit ang isang aparato ng preno, maaaring maantala ng operator ang paggalaw ng manipulator anumang oras habang ginagamit.



Ang ganitong uri ng power manipulator ay kayang magbuhat ng hanggang 500Kg ng workpiece. Ang working radius ay humigit-kumulang 2500mm, at ang taas ng pagbubuhat ay humigit-kumulang 1500mm. Depende sa bigat ng pagbubuhat ng workpiece, dapat piliin ang pinakamaliit na uri ng makina na naaayon sa pinakamataas na bigat ng workpiece. Kung gagamit tayo ng pinakamataas na karga na 200Kg ng manipulator para magbuhat ng 30Kg ng workpiece, tiyak na hindi maganda ang performance ng operasyon, at magiging napakabigat. Ang kagamitan ay karaniwang may tangke ng imbakan ng hangin, na maaari pa ring makumpleto ang isang action cycle sakaling maputol ang gas. Kasabay nito, mag-a-alarm ito upang ipaalala sa operator. Kapag bumaba ang presyon ng hangin sa isang tiyak na lawak, sisimulan nito ang self-locking function upang maiwasan ang pagbaba ng workpiece. Ang manipulator na may safety system, habang hinahawakan o hindi nakalagay ang workpiece sa ligtas na istasyon, hindi mabitawan ng operator ang workpiece. Gamit ang iba't ibang hindi karaniwang fixture, ang hard arm type power manipulator ay madaling makakakumpleto ng iba't ibang aksyon sa proseso.





